ov_hloc
Using Hierarchical-Localization (opens in a new tab) instead of DBoW2 for loop closure. This was originally part of my undergraduate final project, where I worked on improving the loop closure module of VINS-Fusion. I found it just right for providing a loosely coupled pose graph for OpenVINS (opens in a new tab).

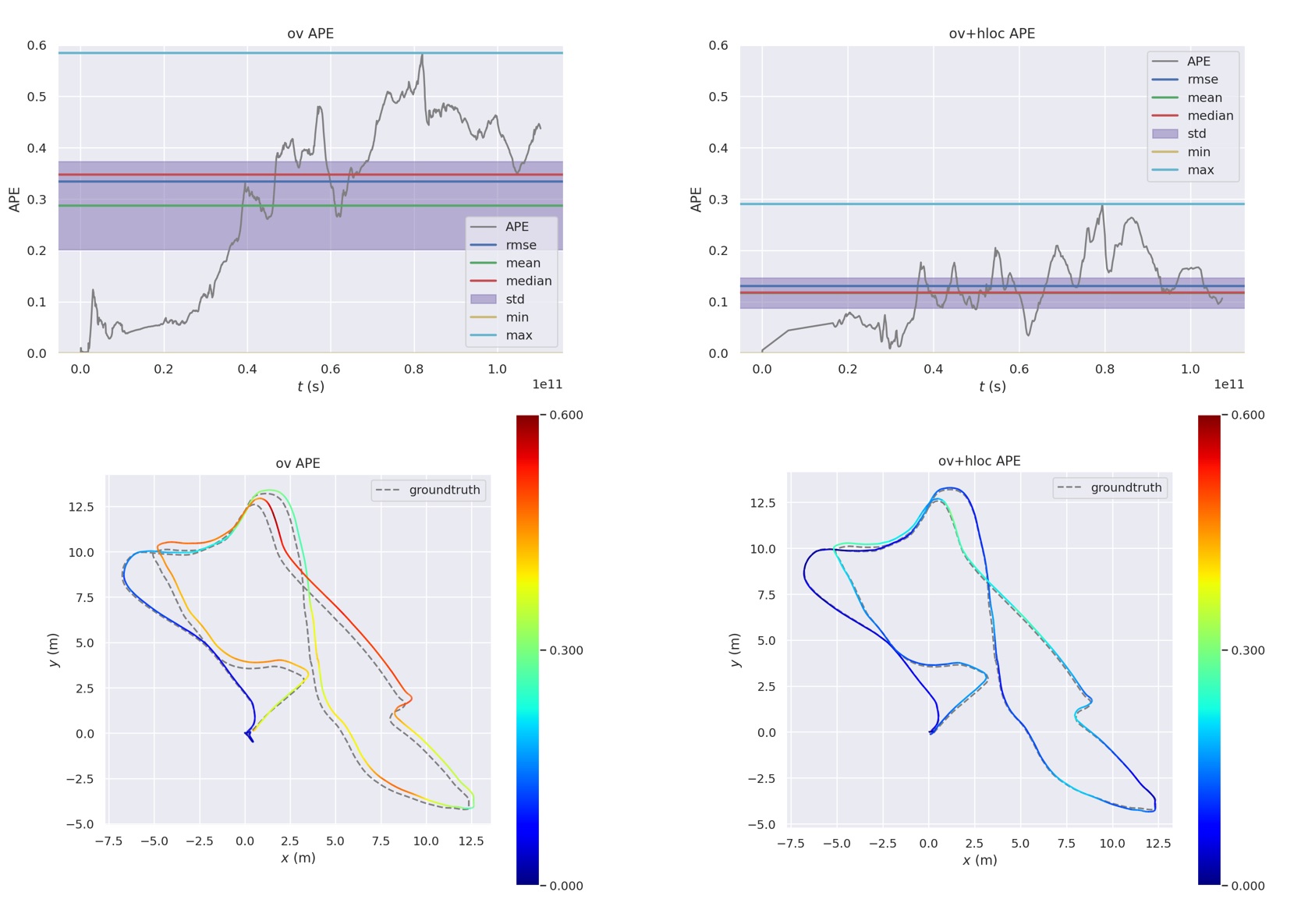
Thanks to the excellent global pose graph optimization provided by VINS-Fusion, this project performs well on the EuRoC dataset.
In the application scenario you can use COLMAP to build SfM maps (using SuperPoint and NetVLAD). The use of a priori maps can give you more accurate positioning results and no accumulative errors.
Dependencies
-
Ubuntu and ROS - noetic/Installation/Ubuntu - ROS Wiki (opens in a new tab) This will help you to install a series of dependencies such as OpenCV.
-
OpenVINS - https://docs.openvins.com/gs-installing.html (opens in a new tab)
-
PyTorch and libtorch - https://pytorch.org/get-started/locally/ (opens in a new tab)
For libtorch, all you need to do is unzip it and fill the file path into loop_hloc/CMakeLists.txt line 22.
# set your own libtorch path set(TORCH_PATH */libtorch/share/cmake/Torch)
I recommend installing them in the following order.
[CUDA and cuDNN]
CUDA:
# You need to adjust it according to your system version
export DISTRO=ubuntu2004
export APT_INSTALL=cuda-toolkit-11-6
# add CUDA into apt-key
sudo apt-key adv --fetch-keys http://developer.download.nvidia.com/compute/cuda/repos/${DISTRO}/x86_64/7fa2af80.pub
echo "deb http://developer.download.nvidia.com/compute/cuda/repos/${DISTRO}/x86_64 /" | sudo tee /etc/apt/sources.list.d/cuda.list
wget https://developer.download.nvidia.com/compute/cuda/repos/${DISTRO}/x86_64/cuda-${DISTRO}.pin
sudo mv cuda-${DISTRO}.pin /etc/apt/preferences.d/cuda-repository-pin-600
# Install CUDA Toolkit
sudo apt update && sudo apt -y upgrade
sudo apt install -y ${APT_INSTALL}
# Set environment variables
cat << 'EOS' >> ~/.profile
export PATH=/usr/local/cuda-11.6/bin${PATH:+:${PATH}}
# Install third-party libraries (optional)
sudo apt install -y g++ freeglut3-dev build-essential libx11-dev libxmu-dev libxi-dev libglu1-mesa libglu1-mesa-devcuDNN:
In order to download cuDNN libraries, you need to go to https://developer.nvidia.com/cudnn (opens in a new tab) and click on the Download cuDNN button. The webpage will ask you to login into the NVIDIA developer account. After logging in and accepting their terms and conditions, you should click on the following three links:
cuDNN Runtime Library for Ubuntu20.04 x86_64 (Deb) (opens in a new tab)
cuDNN Developer Library for Ubuntu20.04 x86_64 (Deb) (opens in a new tab)
cuDNN Code Samples and User Guide for Ubuntu20.04 x86_64 (Deb) (opens in a new tab)
which is relevant to Ubuntu 20.04 LTS. After downloading, you should have the following three .deb files:
- libcudnn8-samples_8.2.0.53–1+cuda11.3_amd64.deb
- libcudnn8-dev_8.2.0.53–1+cuda11.3_amd64.deb
- libcudnn8_8.2.0.53–1+cuda11.3_amd64.deb
that you can install using dpkg commands:
sudo dpkg -i libcudnn8_8.2.0.53-1+cuda11.3_amd64.deb
sudo dpkg -i libcudnn8-dev_8.2.0.53-1+cuda11.3_amd64.deb
sudo dpkg -i libcudnn8-samples_8.2.0.53-1+cuda11.3_amd64.debAfter the installation is complete you can verify the installation with https://github.com/nvidia/cuda-samples (opens in a new tab).
[Pytorch and libtorch]
Pytorch: Follow Start Locally | PyTorch (opens in a new tab) to install Pytorch. Here I recommend using conda to install pytorch.
conda install pytorch torchvision torchaudio cudatoolkit=11.6 -c pytorch -c conda-forgeNote: The cudatoolkit version here does not have to be the same as before.
libtorch: Follow Start Locally | PyTorch (opens in a new tab) to install libtorch. Select Stable (1.12.1) Linux LibTorch C++ / Java CUDA 11.6. Download and extract the zip file corresponding to the (cxx11 ABI) link, you will get a folder named libtorch.
[ROS]
ROS: Follow Getting Started » Installation Guide | OpenVINS (opens in a new tab) to install ROS1.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
export ROS1_DISTRO=noetic # kinetic=16.04, melodic=18.04, noetic=20.04
sudo apt-get install ros-$ROS1_DISTRO-desktop-full
sudo apt-get install python-catkin-tools # ubuntu 16.04, 18.04
sudo apt-get install python3-catkin-tools python3-osrf-pycommon # ubuntu 20.04
sudo apt-get install libeigen3-dev libboost-all-dev libceres-dev
# for bash user
echo "source /opt/ros/$ROS1_DISTRO/setup.bash" >> ~/.bashrc
source ~/.bashrc
# for zsh user
# echo "source /opt/ros/$ROS1_DISTRO/setup.zsh" >> ~/.zshrc
# source ~/.zshrc[OpenVINS]
OpenVINS: Follow Getting Started » Installation Guide | OpenVINS (opens in a new tab) to clone the OpenVINS project.
mkdir -p ~/workspace/catkin_ws_ov/src/
cd ~/workspace/catkin_ws_ov/src/
git clone https://github.com/rpng/open_vins/[ov_hloc]
ov_hloc: Congratulations on all the hard work you've gone through to get here.
mkdir -p ~/workspace/catkin_ws_ov/src/
cd ~/workspace/catkin_ws_ov/src/
git clone https://github.com/Li-Jesse-Jiaze/ov_hloc.gitFill the libtorch folder path into loop_hloc/CMakeLists.txt (opens in a new tab) line 22.
# set your own libtorch path
set(TORCH_PATH */libtorch/share/cmake/Torch)[build and run]
build:
cd ~/workspace/catkin_ws_ov
catkin build
source ~/workspace/catkin_ws_ov/devel/setup.bash # for bash user
# source ~/workspace/catkin_ws_ov/devel/setup.zsh # for zsh userDownload and Convert HF-Net
Download SuperGluePretrainedNetwork/models/weights (opens in a new tab) and place them in support_files/Networks/weights.
cd ~/workspace/catkin_ws_ov/src/ov_hloc/support_files/
python convert_model.pyRun Example
roslaunch ov_msckf subscribe.launch config:=euroc_mav # term 1
rosrun loop_hloc loop_hloc_node ~/workspace/catkin_ws_ov/src/ov_secondary/config/master_config.yaml # term 2
rviz # term 3
rosbag play your/dataset/path/V1_01_easy.bag # term 4select config/vins_rviz_config.rviz as config in rviz
The pose graph was not very smooth when I tested it on my laptop(RTX 2060 Max-Q 65W). This is mainly because my NetVLAD is using a VGG16 (it tooks more than 50ms for each frame 😠). It would be better to use a lighter backbone (e.g. MobileNetV3) and fine-tuning NetVLAD for your application scenario.
Here's a simple video (opens in a new tab) of it working with VINS-Fusion.
©LI JiazeRSS